















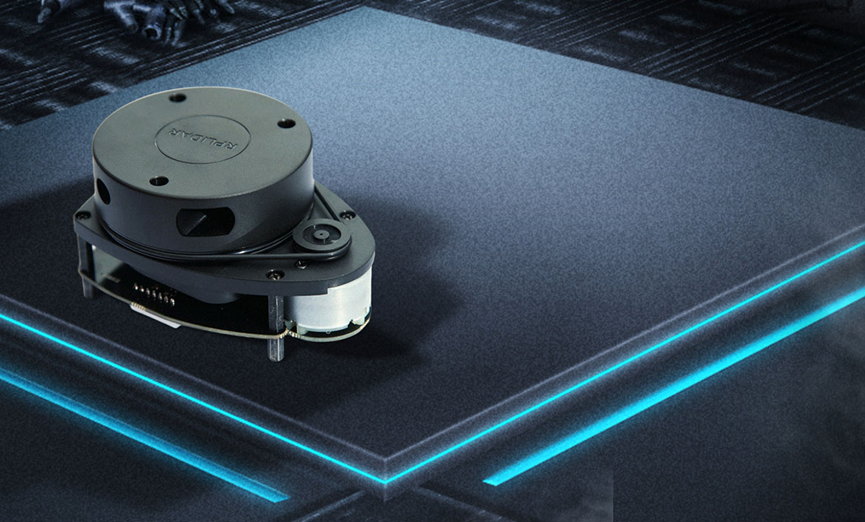
In the realm of smart homes, robotic vacuum cleaners are becoming an indispensable part of modern living. To enhance the environmental perception and navigation performance of these devices, Slamtec Technology has introduced the RPLIDAR A1, a laser radar product that incorporates advanced laser radar technology, providing exceptional environmental perception and navigation capabilities for robotic vacuum cleaners.

The RPLIDAR A1 is a low-cost 2D laser radar (LIDAR) solution developed by SLAMTEC. It enables 360-degree laser ranging scans within a 12-meter radius on a two-dimensional plane, generating point cloud map information of the surrounding space. These point cloud maps find practical applications in tasks such as map mapping, robot positioning and navigation, and object/environment modeling.
Advanced Laser Radar Technology
The ranging core of RPLIDAR A1 rotates clockwise, enabling a 360-degree omnidirectional scanning for distance detection of the surrounding environment. This capability allows the generation of contour maps of the surrounding environment.

Efficient Obstacle Detection and Avoidance
Robotic vacuum cleaners face various complex environments during operation, such as furniture, carpets, and wires. The A1 laser radar, through real-time detection of the distances to surrounding obstacles, can promptly respond and plan obstacle-avoidance paths, ensuring the robot can traverse the environment efficiently and safely.
Opto-magnetic fusion with innovative design
Traditional non-solid-state laser radars often use slip rings to transfer energy and data information. However, due to mechanical wear, their continuous operational lifespan is limited to only a few thousand hours. Through a pioneering design that combines wireless power transmission and optical communication technology, the opto-magnetic fusion technology has been created to completely address issues related to electrical connection failures caused by physical contact wear and the short lifespan of laser radars.
Laser safety standard Class 1
In order to completely ensure the safety of the product for humans and pets, a low-power infrared laser is used as the emitting light source and is driven by modulated pulses. The laser only emits in a very short period of time, which complies with Class 1 laser safety standards and reaches Eye-safe level.

Slamtec’s laser radar A1 provides advanced environmental perception and navigation solutions for robotic vacuum cleaners. Its high resolution, real-time SLAM support, obstacle avoidance, and other features enable robotic vacuum cleaners to perform cleaning tasks more intelligently and efficiently. With continuous technological advancements, the A1 laser radar helps robotic vacuum cleaners adapt better to complex and changing home environments, creating a more convenient and intelligent living experience for users.
In addition, Slamtec Technology has introduced the new generation fusion-type DTOF laser radar, RPLIDAR C1, which is also suitable for robotic vacuum cleaners. Integrated with years of expertise, it excels in high resolution, anti-interference, and anti-tailing when dealing with close-range and subtle objects. With a 12-meter ranging radius, a sampling frequency of 5000 times per second, and a 360-degree omnidirectional laser scanning, its compact and agile appearance fully meets the needs of applications such as robot positioning mapping, navigation, and obstacle avoidance in various environments.



